
오픈소스의 큰 혁신을 이룬 소형 로봇
KUKA youBot은 학술적 연구 및 교육을 위해 오픈소스 플랫폼으로 개발된 소형의 이동식 로봇으로, 하나의 이동식 플랫폼과 로봇 팔로 구성되어 있습니다. 이 로봇에는 맥슨의 드라이브 시스템이 사용되었습니다.
로봇을 연구하는 사람들에게 있어, 로봇을 단계별로 가르치고 각자 개발한 프로그램에 대해 토론하며 서로 공유하는 것은 매우 중요하면서도 흥미로운 도전입니다. 이러한 학술적인 연구 및 교육을 돕기 위해 아우크스부르크(Augsburg)에 위치한 KUKA사는 youBot이라는 이름의 로봇을 개발하였습니다. 오픈소스 소프트웨어로 제어되고 전방향 베이스 및 5자유도의 로봇 메커니즘을 갖춘 이 모바일 매니퓰레이터는 시장에 선보인지 2년만에 모바일 매니퓰레이션 분야의 연구와 교육을 위한 대표적인 소프트웨어로 자리잡았습니다. 지금까지 산업용 로봇 제조업체로 전 세계에 널리 알려진 KUKA사가 로봇 연구를 위한 오픈소스 표준 플랫폼을 개발한 것입니다. 이를 통해 로봇 연구원, 개발자 및 로보틱스를 공부하는 학생들이 IKEA 테이블을 조립하거나 소형 로드 캐리어 또는 부품들을 이른바 '미래의 공장'으로 운송할 수 있는 제어 및 응용 소프트웨어를 직접 만드는 것이 가능해졌습니다.
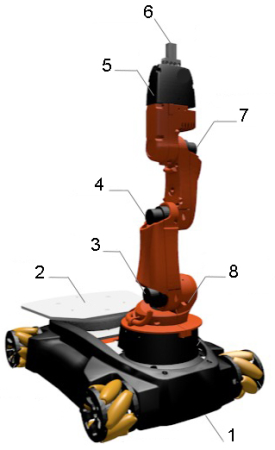
KUKA youBot은 전방향 이동이 가능한 차대(섀시)와 그 위에 장착되는 한 개 혹은 두 개의 로봇암으로 구성되어 있습니다. 차대에는 하나의 산업용 PC와 배터리가 내장되어 있습니다. 이 산업용 PC는 EtherCAT을 통해 전류, 속도 및 위치제어 모드로 작동이 가능한 총 9개의 드라이브와 실시간(1ms 사이클 타임)으로 통신합니다. 로봇 플랫폼과 로봇암은 각각 독립적으로 사용할 수도 있습니다. youBot의 섀시는 길이가 53cm, 너비가 36cm, 높이가 11cm 정도밖에 되지 않으며 4개의 메카넘 휠로 움직입니다. 이 특수한 바퀴는 트레드가 바퀴 둘레에 약 45°의 각도로 장착된 롤러들로 구성되어 있어 youBot은 언제든지 회전 운동과 병진 운동을 동시에 할 수 있습니다. 따라서 측면 및 대각선 동작을 포함한 전방향 움직임이 가능합니다.
플랫폼 위에는 약 66cm 길이의 로봇암이 장착되어 있으며 암의 끝부분에는 두 개의 손가락으로 된 그리퍼가 있어 로봇이 최대 70mm 크기에 500g 무게의 물체를 이동시킬 수 있습니다. 로봇암은 5개의 관절로 이루어져 있으며, 모두 맥슨 드라이브 시스템에 의해 작동됩니다. 여기에 맥슨 모터-기어-엔코더 모듈이 사용되었습니다.
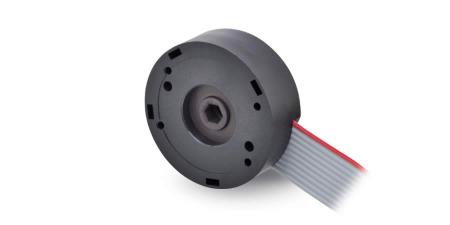
보다 자유로운 움직임을 위해 특수 개발된 플래너터리 기어헤드
youBot 내의 공간이 매우 제한적이었지만 로봇암과 섀시 안에 여러 모터와 플래너터리 기어를 장착해야 했기 때문에 컴포넌트를 로봇암의 관절에 바로 내장하였습니다. 이를 위해 맥슨과 KUKA가 보다 더 가볍고 정확하며 견고한 특수 기어를 공동으로 개발하였으며 관절이 플래너터리 기어 주위를 회전할 수 있습니다.
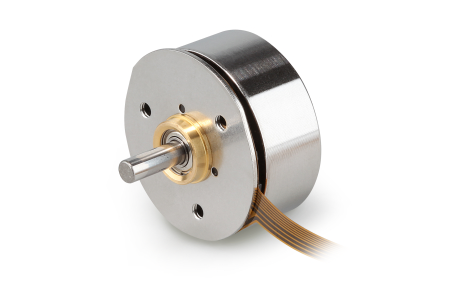
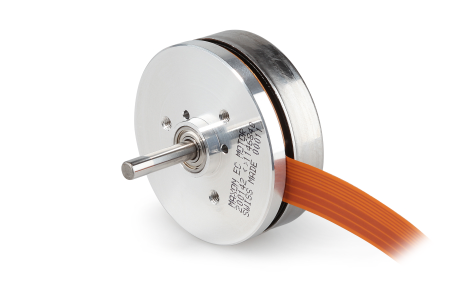
로봇암의 관절에는 총 5개의 브러시리스 플랫모터
(EC 45 flat, EC 32 flat)가 특수 기어 및 엔코더와 결합되어 사용되었습니다. 플랫폼에는 4개의 맥슨 브러시리스 EC 45 플랫모터가 장착되었습니다. 맥슨의 브러시리스
EC 45 플랫은 간단한 설계 및 컴팩트한 크기와 높은 토크가 특징입니다. 이 플랫모터는 46g~110g의 적은 무게로 15W~50W의 출력을 냅니다. 로봇암의 관절은 맥슨 엔코더와 결합하여 관절의 각도를 측정합니다.
새롭게 떠오른 KUKA youBot은 현재 로봇 연구 및 개발의 이정표로 자리매김하고 있습니다. KUKA는 기술 이전을 위한 로보틱스 커뮤니티에 한발짝 더 다가가기 위해 새로운 길을 걷습니다. 로봇의 리눅스 기반 오픈소스 컨셉은 과학자들과 연구자들이 연구의 한계를 뛰어넘는 데에 큰 기여를 하였습니다.




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}